Mar 01, 2011 - Field Day and other progress
Now that my hardware is complete, and I have enough software to get data from my sensors and log it, it’s time to start field testing the robot.
On Saturday 2/19 I was at the very awesome Super Happy Dev House #42, where I had a chance to do some data structure design, and to show off the robot a bit.
The following Monday, I was ready for field-testing! I grabbed my robot, a few things that would be helpful, and sat down on Dexter Lawn to collect GPS data so that I can characterize the noise in my GPS readings. This mostly involved me sitting in one place and watching the GPS log.


I was noticing an unusual amount of what appeared to be line noise and corruption in my incoming GPS data, so I investigated the software for a while before deciding that it was probably a hardware problem and heading for one of the electrical engineering labs where I could use an osiclloscope. 3 hours later, I found my problem: an uninitialized variable in my data-parsing code. oops.
I headed up to the UU plaza for more testing, and took the opportunity and the flat space to play with the robot and drive it around a bit, testing cornering and full speed. I’ve concluded that my speed control still needs some work, but it corners vary well.
Since GPS was working now too, I sat down and spent about 30 minutes gathering GPS data.

I’ve been working on the analysis of that data over the past few weeks, with interesting results. Firstly, I’ve been using it to test my map models, as a verification that my data is correct, that I can correctly interpret the data, and that my map models are working properly.
I’ve plotted all roughly 1800 GPS points gathered over that half-hour on google maps, and the results are quite a bit more scattered than I’d like.
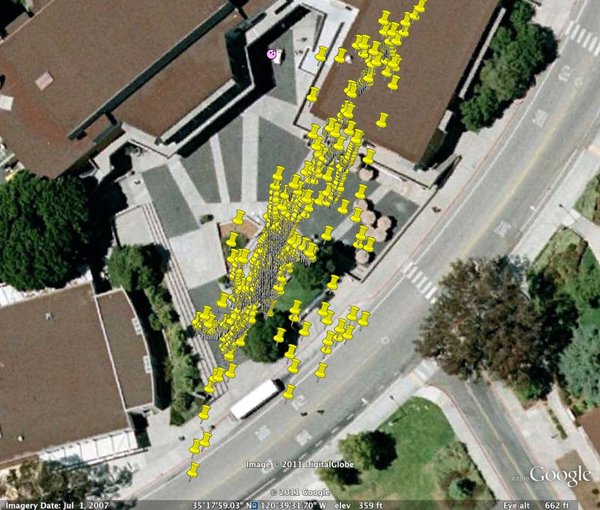
I’ve also made a very rough plot of the points that are one standard deviation away from the mean in each direction.

The next step on this is to do some analysis of various-sized samples of the data, to determine how many data points I need and what final accuracy I can expect from them.
Home