Dec 21, 2010 - Teardown
The time has come to take everything I learned last quarter and condense it into new hardware and software for the robot. First, I have to remove all of the old control hardware, to make way for the new. Without further ado, the robot, with all of the old control hardware removed:
The center of the robot. With the electronics and batteries removed, there's a lot of space.

The front of the robot, with the old LED bar and driver board removed to make way for mounts for a Kinect or a laser scanner.

All of the old hardware that was removed.
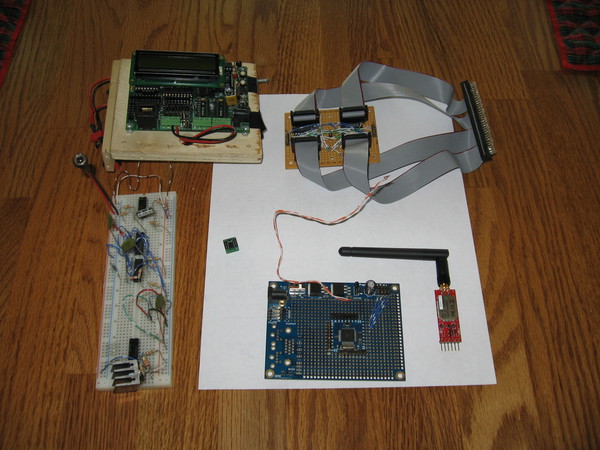
Roughly clockwise from lower left:
- Sonar interface and level conversion breadboard, including 5V regulator.
- Polybot 1.0 board and mouting bracket.
- LED bar and driver board.
- Bluetooth radio module.
- Propeller proto board.
- The tiny HM55B compass module.
And the new hardware that's going to replace all of that and the Android phone.

Roughly clockwise from bottom:
- ALIX.3D2 Motherboard
- Arduino Mega 2560
- 40x2 LCD display. Not sure if I'm going to include this or not.
- Bluetooth radio module.
- The tiny HM55B compass.
- New sonar interface chip and board.
- GPS module.
That's all for now; the next post will probably be ideas and designs for new mounting brackets and layouts.
Home