Jan 18, 2011 - (Re)Assembly
When I first assembled the robot, I was in a bit of a hurry to get it done before break was over, so I didn’t take as many pictures as I should have of the assembly process. Tonight, as part of resolving another bug, I had to disassemble most of the robot, so I decided to do a little cleanup while I was at it and document the parts and the assembly procedure. So, here it is!
All of the parts that are go into the center of the robot.
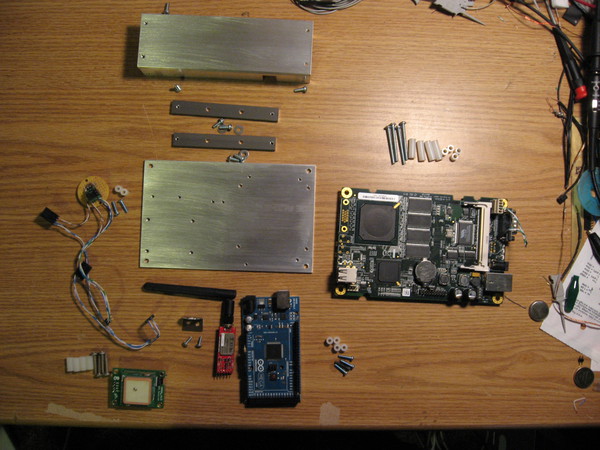
Parts, from top to bottom (mostly)
- Center channel support
- Support cross members
- Compass and power distribution board
- Main mounting plate
- Alix.3D2 single-board computer
- GPS module
- Bluetooth module and bracket
- Arduino Mega 2560
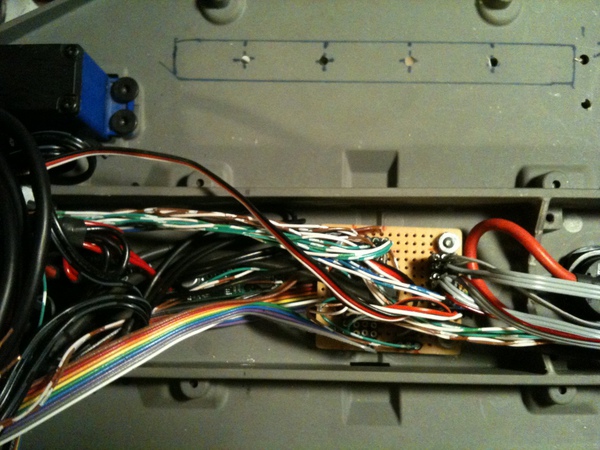
The center channel of the robot, and all of the sensor distribution electronics that are normally hidden:
The center channel, ready to install the center channel bracket:

With the center channel bracket installed:

Cross members installed

Computer and main mounting plate installed

Arduino and Bluetooth bracket installed

Compass and power distribution installed

Bluetooth module installed

GPS installed. We’re done!
